Essentiels et orientations futures de la chirurgie robotique pancréatique,et Pancréatectomie distale laparoscopique robotisée avec splénectomie
La chirurgie pancréatique mini-invasive gagne finalement du terrain, mais des inquiétudes demeurent quant à la capacité de gérer des scénarios opératoires difficiles. Un examen rétrospectif d’une base de données mise à jour de façon prospective a été effectué pour identifier les patients qui ont reçu une résection artérielle, ou ont nécessité une réparation artérielle, au cours d’une résection pancréatique assistée par robot (RA-PR). Toutes les procédures ont été enregistrées sur vidéo. Entre octobre 2008 et juin 2019, un total de 361 RA-PR ont été effectués. Des procédures vasculaires associées ont été nécessaires chez 31 patients (8,5%), y compris une résection ou une réparation des segments artériels dans cinq cas (1,3%): tronc coeliaque ( n = 1), artère hépatique ( n = 2), artère splénique ( n = 1 ) et l’artère mésentérique supérieure ( n = 1). Chez trois patients, une résection artérielle a été nécessaire pour gérer l’infiltration tumorale. Chez les deux autres patients, une blessure peropératoire a nécessité une réparation artérielle. Toutes les procédures ont été achevées sans conversion en chirurgie ouverte et aucun patient n’a développé de complications graves. Au suivi le plus long, toutes les reconstructions vasculaires sont brevetées. Nos résultats n’appellent pas une utilisation plus libérale de l’assistance robotique dans les tumeurs pancréatiques résécables limites ou localement avancées, mais soulignent plutôt l’importance d’une bonne planification préopératoire et la nécessité de compétences vasculaires avancées pour une mise en œuvre sûre de la PR-PR.
Résections vasculaires robotisées pendant la procédure de Whipple
Abstrait
Les indications de résection des cancers du pancréas ont évolué pour inclure des patients sélectionnés avec atteinte des structures vasculaires péri-pancréatiques. Les procédures Open Whipple ont été l’approche standard pour les patients nécessitant une reconstruction de la veine porte (PV) ou de la veine mésentérique supérieure (SMV). Récemment, des centres à volume élevé effectuent des procédures de Whipple peu invasives avec des résections portoveineuses. Notre établissement a effectué soixante-dix procédures robotisées de Whipple avec résections vasculaires concomitantes. Ce rapport décrit notre technique.
introduction
Le cancer du pancréas est la quatrième cause de décès par cancer aux États-Unis. La résection chirurgicale avec des marges négatives est la seule chance curative pour les patients n’ayant aucun signe de métastase au diagnostic. Plusieurs études ont montré des résultats similaires pour les patients atteints d’une maladie loco-régionale par rapport aux patients atteints d’un cancer du pancréas résécable, si les résections R0 sont atteintes au moment de la chirurgie ( 1 – 3 ). Ces résultats sont généralement observés avec l’ajout de thérapies néoadjuvantes à l’algorithme de traitement ( 4 – 6 ).
La chirurgie pancréatique avec résection veineuse majeure reste un sujet de controverse. Cependant, de plus en plus d’institutions proposent cette chirurgie à des patients soigneusement sélectionnés. Étant donné la complexité supplémentaire de la résection pancréatique avec reconstruction veineuse, l’approche chirurgicale initiale était une chirurgie ouverte. Cependant, des approches mini-invasives ont récemment été appliquées car certains centres ont acquis une expérience dans les résections pancréatiques robotiques ou laparoscopiques ( 7 , 8 ). Divers examens institutionnels ont montré que la chirurgie mini – invasive pour résections du pancréas qui résécable traitement de la limite ou les tumeurs du pancréas localement avancé est à la fois sûre et réalisable ( 9 – 14). Cet article se concentre sur la technique de la procédure robotique de Whipple avec résection vasculaire concomitante utilisée dans notre établissement.
Bilan préopératoire
Une tomodensitométrie triphasique à contraste amélioré de l’abdomen et du bassin est réalisée pour exclure la maladie métastatique et évaluer la tumeur pancréatique et sa relation avec les vaisseaux péri-pancréatiques. Ensuite, une évaluation endoscopique est réalisée avec le stenting et les brossages ERCP +/− et l’échographie endoscopique (EUS) pour délimiter l’étendue de l’atteinte vasculaire et pour réaliser une biopsie pour le diagnostic tissulaire. La chimiothérapie est recommandée pour tous les patients présentant des signes préopératoires de butée / d’enrobage de vaisseaux péri-pancréatiques. Nous mesurons les niveaux de CA 19-9 avant (une fois que les patients ont une bilirubine totale normale) et après un traitement néoadjuvant. La réduction de l’AC 19-9 après les thérapies néoadjuvantes a été associée à des taux accrus de résection R0, de réponse histopathologique et de survie ( 15). En l’absence de réponse radiographique à un traitement néoadjuvant, la réponse CA 19-9 peut parfois aider à décider si un patient est candidat à une exploration chirurgicale, tant que l’atteinte veineuse semble susceptible de reconstruction. Plus précisément, un bon objectif d’entrées et de sorties avec un segment relativement court est requis. Tous les cas sont examinés individuellement et discutés dans un comité multidisciplinaire des tumeurs. Les patients ne sont pas exclus de la possibilité d’une résection mini-invasive en fonction de l’âge, de l’indice de masse corporelle (IMC) ou des comorbidités; cependant, une chirurgie abdominale étendue préalable, en particulier une résection pancréatique ou hépatique antérieure, est considérée comme une contre-indication relative. La seule contre-indication absolue à la PD robotique dans notre établissement est l’enveloppe vasculaire d’un long segment de la veine porte (PV) ou de la veine mésentérique supérieure (SMV), ce qui nécessiterait probablement une greffe d’interposition. Nous utilisons généralement la veine jugulaire interne comme conduit pour les greffes d’interposition. L’ergonomie du robot ancré sur la tête du patient peut rendre cette récolte potentiellement difficile.
Procédure
Préparation à l’anesthésie
Avant la chirurgie, les patients prennent une préparation intestinale et sont encouragés à faire le plein de glucides. De plus, ils sont autorisés à avoir des liquides clairs jusqu’à deux heures avant la chirurgie. Tous les patients sont pris en compte pour notre protocole institutionnel de récupération améliorée après chirurgie (ERAS) utilisant une analgésie multimodale, minimisant les opioïdes IV et la gestion des fluides intra-opératoire ciblée. Comme les autres procédures abdominales majeures, les patients reçoivent une dose d’héparine sous-cutanée prophylactique avant l’induction et portent des bottes de compression mécaniques pneumatiques. Les antibiotiques préopératoires sont administrés dans l’heure suivant l’incision et re-dosés comme indiqué. L’hémodynamique est surveillée avec une ligne artérielle, un cathéter veineux central +/- et Foley. Un tube gastrique oral est placé après l’intubation et retiré pendant la chirurgie.
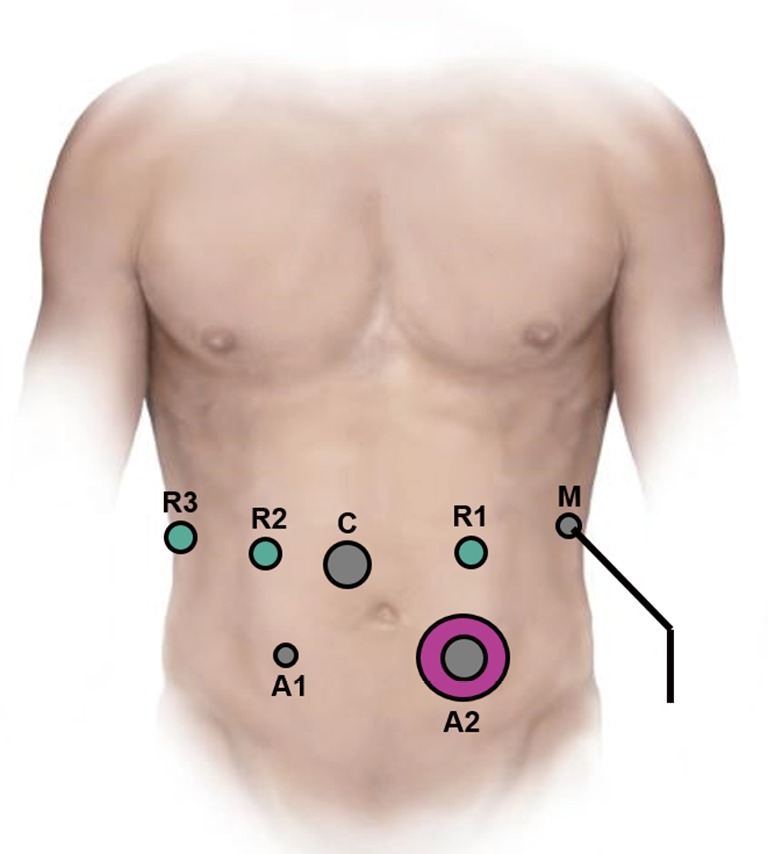
Placement du port
Au fil du temps, plusieurs modifications mineures ont été apportées à notre PD robotique standard ( 16 – 18 ). Une table de jambe fendue est utilisée pour permettre l’accès à l’abdomen pour un assistant chirurgien. L’entrée dans la cavité abdominale est réalisée via une incision d’un cm dans le quadrant supérieur gauche à l’aide d’un trocart séparateur optique et d’une lunette de 0 degré 5 mm. La cavité abdominale est ensuite insufflée de CO 2gaz. L’abdomen est inspecté pour détecter des signes de carcinomatose ou de maladie métastatique. Les ports restants sont ensuite placés. Un port de 12 mm est placé à deux largeurs de doigt au-dessus et à droite de l’ombilic, deux ports robotiques de 8 mm sont placés dans le quadrant supérieur droit, un port de 5 mm est placé dans le quadrant inférieur droit, un port de 12 mm dans le quadrant inférieur gauche et un port de 5 mm dans la ligne axillaire antérieure sur le côté gauche de l’abdomen. Le placement typique des ports est décrit dansFigure 1. Un écarteur hépatique est ensuite placé à travers cet orifice de la ligne axillaire antérieure avec un Mediflex.